ROVER4MARS challenge
What is about ?
The challenge is to design and build a Mars rover prototype.
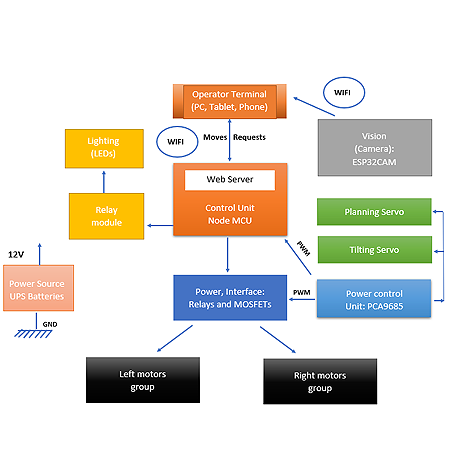
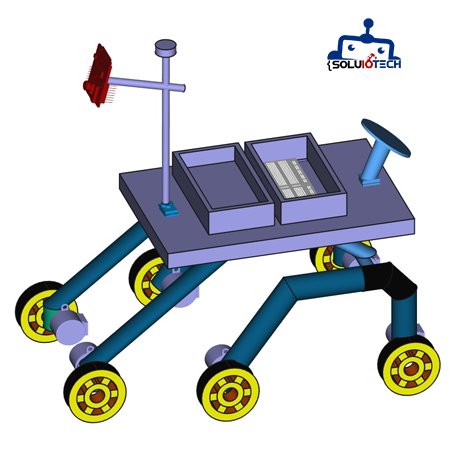
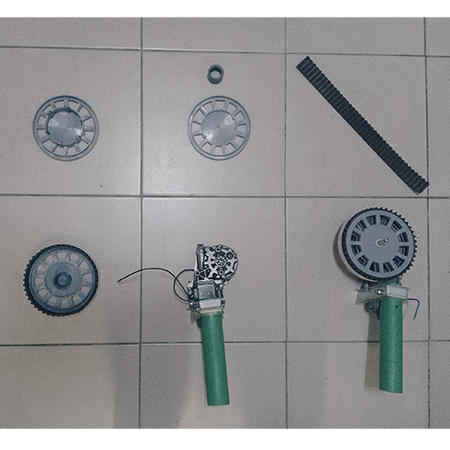
Our rover is based on the models of NASA’s: curiosity and perseverance. It is therefore equipped with six (6) non-steerable drive wheels, to facilitate design and reduce manufacturing costs. It is able to ride on sandy and rocky terrain and is capable of climbing obstacles of a certain size: 30cm Max, thanks to its structure type rocker-bogie, unlike the 4 wheels rovers.
Environmental constraints: It can withstand temperatures ranging from -25°C to 130°C (due to the L298N which has the lowest values in our assembly.) Electronic components are protected from water and dust, but the wheels must not pass through water because of the engines.
Technical constraints: it has a weight of 25Kg empty and is powered by 2 12V batteries recovered from 2 Uninterruptible Power Source (UPS) damaged. Communication and remote control are provided by a WIFI network, using the HTTPS protocol. Its dimensions are 36x32*85cm.